Da igual que hablemos de un deportivo de 75.000 euros como un Audi RS 3, de un coche de medio millón de euros como un Ferrari SF90 Stradale o de hypercars como un McLaren P1… Cada uno a su manera, todos recurren al Torque Vectoring o vectorización del par para mejorar el comportamiento dinámico. Una tecnología que empezó a popularizar Mitsubishi con sus victorias en el campeonato del mundo de rallies, y que aplicó a las sucesivas generaciones de su mítico Lancer Evo de calle, aunque por aquel entonces se le llamaba de otra manera: active yaw control, o control activo del momento de guiñada. Pero, ¿qué es el Torque Vectoring y cómo funciona?
Una cuestión de adherencia
Básicamente, la tecnología torque vectoring o de vectorización selectiva del par permite modificar de forma controlada el par motor que recibe cada una de las ruedas de un eje, algo que no se puede lograr con un diferencial abierto, cuyo reparto es de 50/50, sin recurrir a sistemas de control adicionales.
¿Y para qué necesitamos el torque vectoring? Pues porque al tomar una curva, las ruedas exteriores tienen más capacidad para transmitir potencia al suelo que las interiores, que se encuentran más descargadas. Gracias al reparto de par selectivo en las ruedas se puede favorecer el cambio de dirección en la trayectoria del coche, complementando al giro que proporciona la dirección.

Se consigue, por lo tanto, que el coche tenga un mejor comportamiento dinámico, sobre todo en conducción deportiva. En otras palabras: con el torque vectoring un coche puede tomar las curvas más rápido, ya que la tecnología permite reducir el subviraje (que el coche se vaya recto en las curvas y haya que girar más el volante, limitando la capacidad del los neumáticos para transmitir potencia al suelo)… o aumentar el sobreviraje, hasta incluso hace que el coche llegue a derrapar.
Sistemas de vectorización selectiva de par
Aunque la mayoría de los sistemas torque vectoring se utilizan en coches con tracción a las cuatro ruedas, también podemos encontrarlos en vehículos con tracción a un único eje, ya sea de tracción delantera o propulsión trasera. El objetivo es el mismo: que llegue más par a la rueda con más capacidad de transmitir potencia al suelo, es decir, la exterior a la curva. ¿Cuánto? Pues todo el que sea capaz de gestionar, en función de la adherencia.
Para lograrlo, los fabricantes utilizan diferentes sistemas. El más sencillo es a través de la frenada selectiva de las ruedas, gracias al ABS y al control de estabilidad ESP. Frenando la rueda interior a la curva cuando empieza a tener problemas para transmitir la potencia al suelo se consigue un efecto autoblocante que permite controlar el reparto del par. En cierto modo, el principio de funcionamiento del Control de Estabilidad tiene mucho que ver, aunque con un objetivo totalmente diferente: en este caso se actúa de forma selectiva sobre los frenos para generar un momento de guiñada del vehículo (movimiento alrededor de su eje perpendicular) contrario al que tiende a sacar al coche de la trayectoria, mejorando la seguridad.
Lo que permite un sistema torque vectoring, para entenderlo mejor, es retrasar el momento en el que tendría que actuar el ESP, permitiendo aprovechar mucho mejor la potencia del motor y el agarre de los neumáticos. El ESP puede cortar de raíz un comportamiento subvirador o sobrevirador para evitar perder la trayectoria, mientras que un sistema torque vectoring tiene la capacidad de hacer que el coche sea más subvirador o más sobrevirador, en función de lo que necesitemos, para pasar por las curvas más rápido.
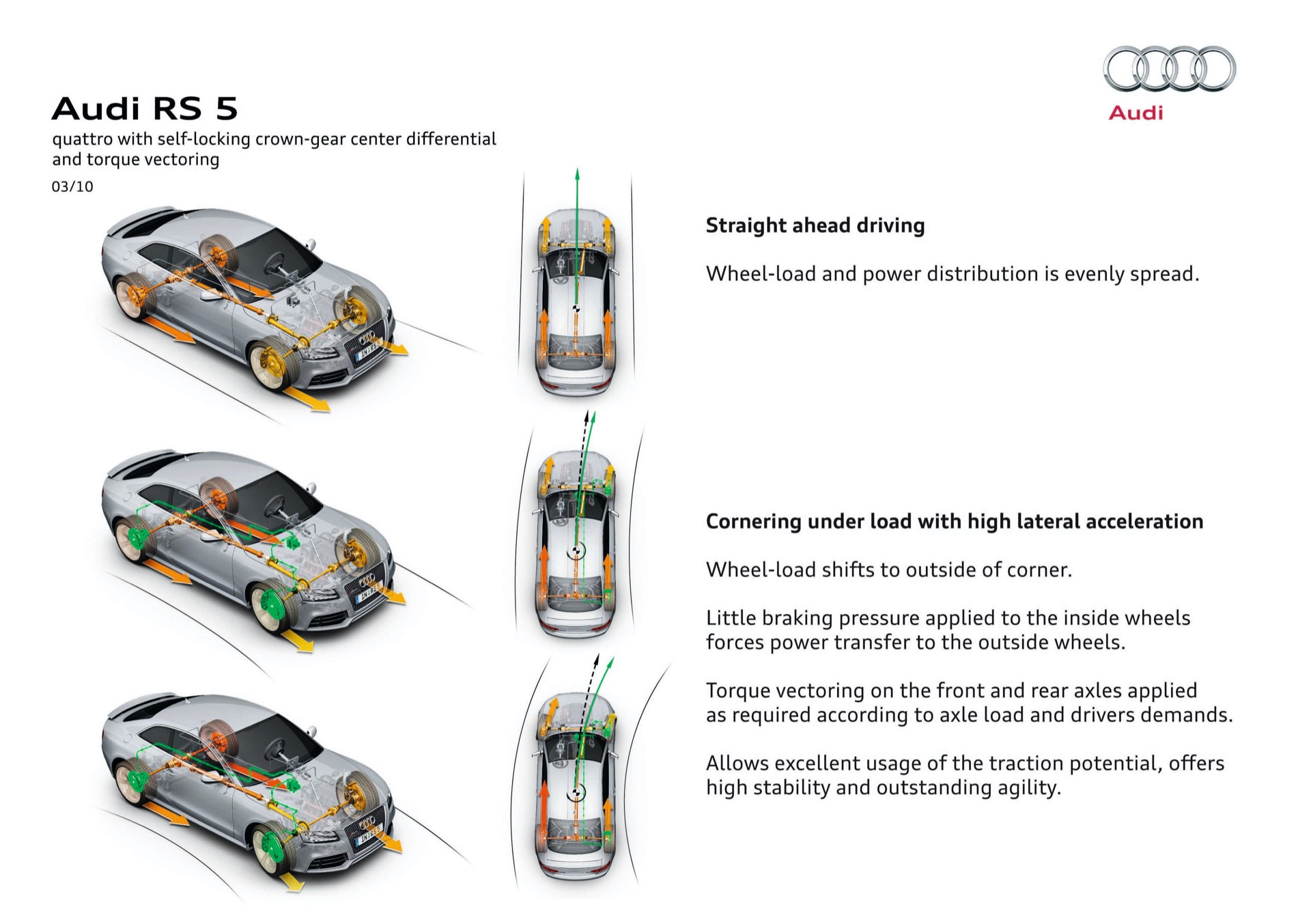
Otros sistemas de vectorización selectiva del par utilizan diferenciales de deslizamiento limitado controlados electrónicamente o embragues electrohidráulicos a la salida del diferencial. Audi, por ejemplo, ofrece como opción el diferencial deportivo en sus modelos quattro, que permite este reparto variable del par entre las ruedas del eje trasero. Y en el nuevo Audi RS 3 se ha pasado del anterior embrague multidisco con un diferencial central convencional al nuevo diferencial trasero RS Torque Splitter, que reparte el par de forma variable y activa entre las dos ruedas de este eje en función de la aceleración longitudina y lateral, la posición del acelerador, la marcha seleccionara, la velocidad de giro de las ruedas… ¡Incluso tiene un modo que permite derrapes controlados!

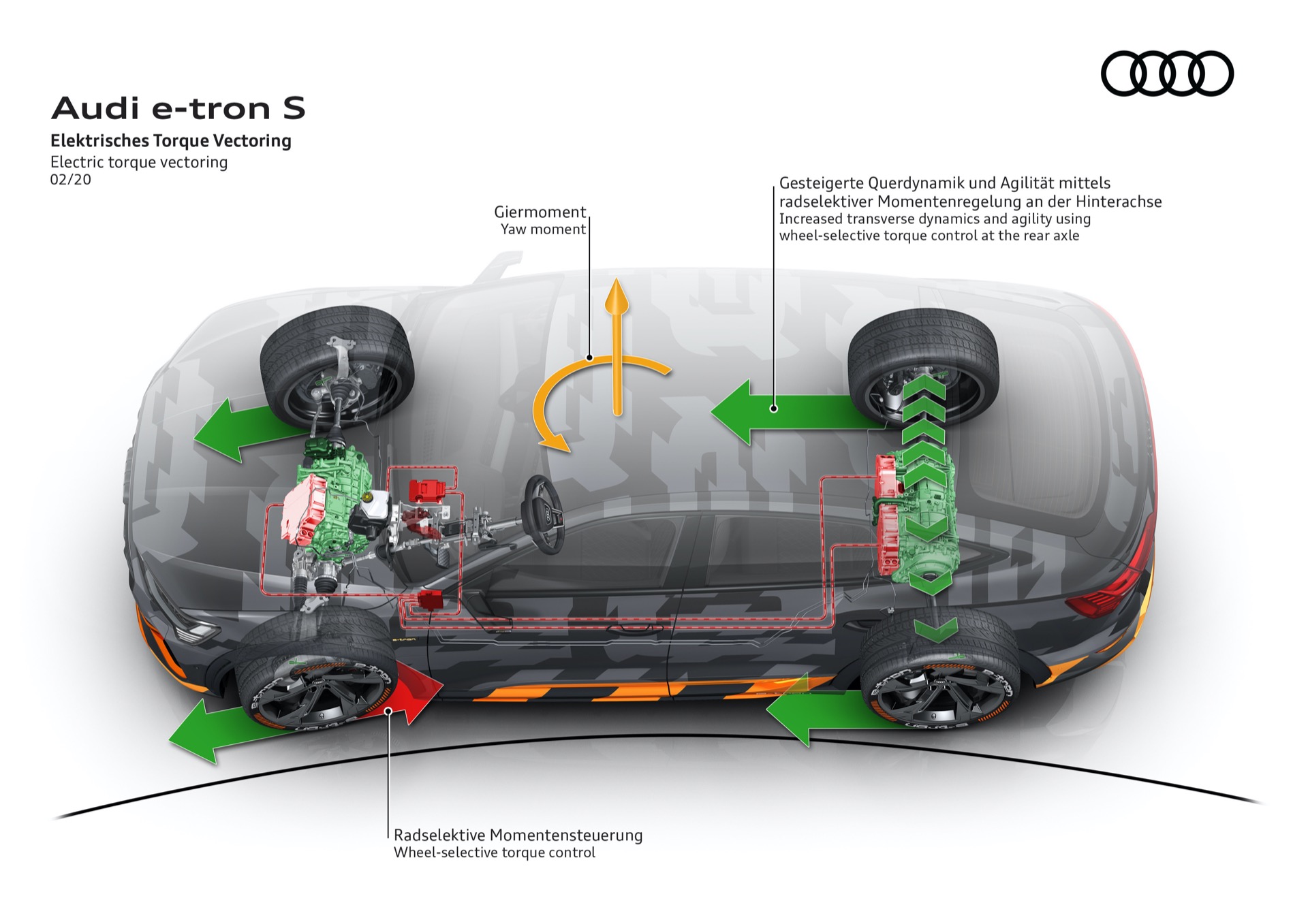
Ahora, la vectorización de par cobra una nueva dimensión con la llegada de la nueva generación de coches eléctricos. Con un motor en cada eje, controlar el par entre las ruedas es mucho más sencillo. Y no digamos en coches con dos motores en el mismo eje, como los Audi e-tron S, en los que cada motor eléctrico trasero puede enviar el par directamente a la rueda correspondiente sin utilizar un diferencial mecánico. No solo se pueden gestionar pares de tracción muy elevados, sino que es posible hacerlo en apenas unos milisegundos.
Como puedes imaginar, el summun del torque vectoring lo encontramos en coches eléctricos con un motor en cada eje, en los que las posibilidades en cuanto a la gestión de par de forma individualizada para cada rueda son infinitas. Sólo así coches como el Rimac Nevera, con casi 2.000 CV, pueden gestionar la entrega de potencia al asfalto.